
ロボットプログラミング講座 赤外線フォトリフレクタを使った衝突回避自動車
8月前半は左右独立モーターの自動車を組み立て、
思い通りに走らせるプログラミングを練習しました。
そして、後半は衝突回避自動車の
プログラミングを行いました。
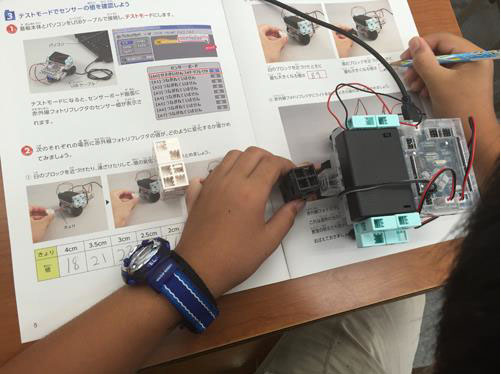
車が障害物を感知するため、今回は新たに
「赤外線フォトリフレクタ」というセンサーを使用します。
ミッション内容は以下の通りです。
1.前進させて小学物があれば車が止まる
2.前進させて障害物があれば、車が止まり、
障害物が近づくとぶつからないように車が後退する。
3.コースを前進させて、障害物があれば
障害物をよけて元のコースに戻る。
まず最初に赤外線フォトリフレクタの
昨日の説明を行います。
どれほど近づければ、
値がどのように変化するかを調べます。
その次に、
「もし赤外線フォトリフレクタの値が〇になれば
車をぴたっと止める。
そうでなければ車を走らせる」
というプログラムを入力して車を走らせます。
興味深いのは、同じように車を走らせるというだけでも
3人いれば、3人とも違ったプログラムを書くということです。
ちゃんと動いているのですが、
必要ないプログラムを書いている場合もあります。
必要なプログラムを書いているのですが、
ある命令を入れ忘れているために、プログラム同士が
競合し、車が進めばよいのか止まればいいのか
わからない動きをしていたり、本来の速度より
ゆっくりになってしまうなど面白いアクシデントが
たくさんありました。
今回は複雑になるプログラムを書くヒントとして
フローチャートを作るという勉強もしました。
▼お問い合せ
https://smoothcontact.jp/front/output/7f00000111efeb1796e1ad446abf9724
▼資料請求
https://smoothcontact.jp/front/output/7f00000111efeb17977353afcef920b0
▼面談予約
https://smoothcontact.jp/front/output/7f000001b62b01cc7c2c786dac0f527
▼特典付き面談予約サイト
https://g-circle.jp/toiawase